
François DRUELLE
Chargé de Recherche



17 Place du Trocadero et du 11 Novembre
75116 Paris
Chargé de Recherche (CRCN)
Intervenant Licence 1 Mineure (Sorbonne Université) - Primatologie (depuis 2023) - 2 x 2h00
Intervenant Licence 2 Mineure (Sorbonne Université) - Locomotion des primates : fonction, diversité, évolution (depuis 2024) - 2h00
Intervenant Formation Expérimentation Animale (Marseille) - Anatomie des Primates (depuis 2019) - 2h00
Intervenant Formation Primatologie (MNHN, Paris) - Locomotion des Primates (depuis 2021) - 2h00
Intervenant Master 2 BEE, Parcours QPB29 (Master Biodiversité, Ecologie, Evolution, MNHN, Paris) - Anatomie Fonctionnelle du Système Locomoteur (depuis 2020) - 3h00
Intervenant Master 2 BEE, Parcours QPB14 (Master Biodiversité, Ecologie, Evolution, MNHN, Paris) - Non-human primates, comparative models for hominins› bipedalismS (depuis 2023) - 2h00
PRESENTATION GENERALE
De nombreux phénomènes sélectifs liés aux diverses pressions environnementales ont eu lieu au cours de l’évolution menant ainsi à une diversification incroyable des organismes vertébrés. Le résultat de ces processus est l’émergence d’adaptations morphologiques diverses associées à des capacités locomotrices spécifiques. La recherche des relations que l’on peut établir entre une morphologie (forme) et une capacité locomotrice (fonction) est le moteur de mes travaux.
Numerous selective phenomena related to various environmental pressures have occurred during evolution, leading to an incredible diversification of vertebrate organisms. The result of these processes is the emergence of diverse morphological adaptations associated with specific locomotor abilities. The investigation of relationships between morphology (form) and locomotor ability (function) is the focus of my work.
Dans ce contexte, je m’intéresse plus particulièrement à l’évolution locomotrice de la lignée humaine (hominines) lors de l’émergence des capacités bipèdes au cours du Miocène et du Pliocène. Pour explorer les processus évolutionnaires qui se sont produits pendant ces périodes clés, je travaille dans un cadre comparatif large intégrant l’évolution des primates, l’évolution des différents modes posturaux et locomoteurs et notamment la marche bipède, ainsi que les contraintes (mécaniques, énergétiques) liées aux déplacements.
In this context, I am interested in the locomotor evolution of the human lineage (hominins), particularly in the emergence of bipedal capabilities during the Miocene and Pliocene. To explore the evolutionary processes that occurred during these key periods, I work within a broad comparative framework that integrates the evolution of primates, the evolution of different postural and locomotor modes, especially bipedal walking, and the constraints (mechanical, energetic) associated with movement.
Concrètement, mon approche se veut intégrative et se place à trois niveaux d’analyse :
(1) Les caractéristiques intrinsèques des systèmes locomoteurs (propriétés d’inertie du corps, proportions corporelles, organisation des muscles) ;
(2) La biomécanique du mouvement (cinématique 2D et 3D, paramètres spatio-temporels de la marche, physiologie : activité musculaire) ;
(3) Le répertoire posturo-locomoteur réalisé au cours des activités quotidiennes et en lien avec les contraintes structurelles de l’environnement (substrats).
My approach is integrative and operates at three levels of analysis:
(1) Intrinsic characteristics of locomotor systems (inertial properties of the body, body proportions, muscle organization);
(2) Biomechanics of movement (2D and 3D kinematics, spatiotemporal parameters of walking, physiology: muscle activity);
(3) The postural-locomotor repertoire performed during daily activities and linked to structural constraints in the environment (substrates).
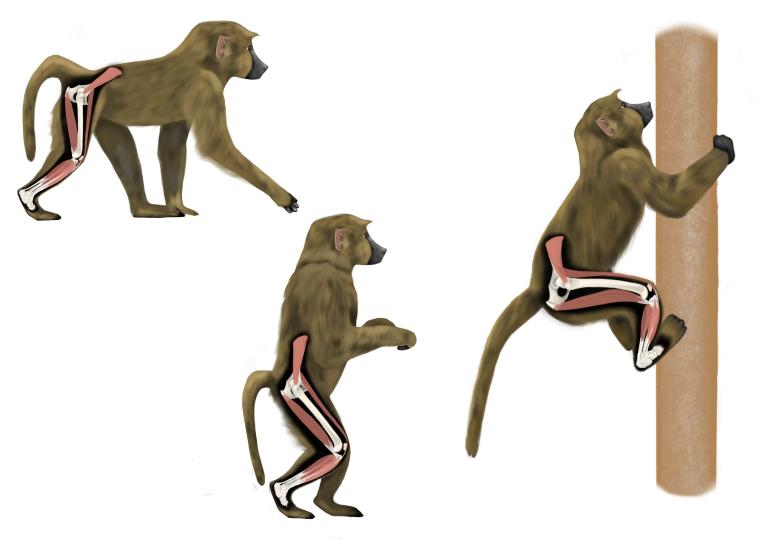
Jeune babouin présenté dans différentes postures : quadrupédie, bipédie et grimper vertical. Il est possible d'observer différents muscles auxquels nous nous intéressons en particulier, le muscle gluteus medius, le biceps femoris, le rectus femoris, le muscle gastrocnemius latéral, le peroneus (long fibulaire) et le tibialis anterior.
LOBO-4 est un projet fédérateur du département « Homme et Environnement » du MNHN initié en septembre 2021 (financement 2022 & 2024). Ce projet est porté et co-porté par François Druelle et Victor Narat et est mené en collaboration avec l’ONG MMT en République Démocratique du Congo.
Une étudiante en doctorat, Amira Perrot, nous rejoint sur ce projet ainsi que Gilles Berillon depuis le 1er octobre 2023.
« Contrairement au bonobo (Pan paniscus) et au chimpanzé (P. troglodytes), l’espèce humaine a graduellement colonisé l’ensemble des continents. Les capacités locomotrices d’Homo sapiens sont bien connues et permettent de comprendre le caractère « nomade » de notre espèce. Bien qu’il existe un certain nombre d’études sur les capacités locomotrices des chimpanzés, celles sur le bonobo restent limitées. Des hypothèses proposent pourtant qu’il existerait de réelles différences locomotrices entre ces deux espèces. Analyser les capacités locomotrices des bonobos est essentiel pour mieux comprendre comment ils utilisent leur habitat et se dispersent. Cela permet notamment d’identifier ce qui fait ou non barrière géographique et ainsi de mieux déterminer les conséquences de la fragmentation de l’habitat pour cette espèce. Dans une perspective évolutive, l’étude du contexte éco-fonctionnel de la locomotion du bonobo pourrait aussi nous éclairer sur les contraintes auxquelles les premiers hominines devaient faire face. Par ailleurs, les connexions entre les différents champs disciplinaires (biomécanique, écologie, géographie, conservation et paléoanthropologie) sont pratiquement inexistantes. Le projet LOBO-4 a pour but de mettre en place des méthodes innovantes permettant d’analyser les capacités locomotrices du bonobo en lien avec son habitat. Ce projet nous amènera notamment à tester une méthode permettant l’acquisition de données de mouvement en milieu naturel pour mener des analyses fines, basées sur le deep learning, des capacités de déplacement des bonobos. »
2024 - Vertical climbing in free-ranging bonobos: An exploratory study integrating locomotor performance and substrate compliance. https://doi.org/10.1002/ajpa.24894
SyNTés est un Projet Exploratoire Premier Soutien (PEPS) de l’INEE (financement 2022)
Porteur :
François Druelle
Collaborateurs :
Marco Ghislieri (Department of Electronics and Telecommunications, Politecnico di Torino)
Valentina Agostini (Department of Electronics and Telecommunications, Politecnico di Torino)
Gilles Berillon (UMR 7194 (HNHP) CNRS, MNHN, UPVD)
Pablo Molina-Vila (UAR 846, Station de Primatologie du CNRS)
Objectif du projet : L’objectif du projet SyNTés est de réaliser une série d’expérimentations courtes afin d’étudier le mouvement et l’activité musculaire chez un primate non-humain, le babouin olive, se déplaçant dans différents contextes. Nous proposons ainsi de tester par l’expérimentation pour la première fois l’hypothèse d’un contrôle modulaire des muscles, soit l’existence de synergies musculaires mises en oeuvre lors de déplacements complexes et selon des modes diversifiés. Ce projet de recherche peut aujourd’hui être proposé et initié dans le cadre d’un PEPS grâce à l’expertise et l’expérience développées par le porteur du projet, FD, au dispositif technique (Plateau Motion Analysis of Primates - MAP) que l’UMR HNHP (GB et FD) a installé sur le site de la station de Primatologie (SdP) du CNRS (UAR 846, Rousset, France), à l’expertise de la SdP en matière d’entrainement et de comportement des primates (PMV), ainsi qu’à une nouvelle collaboration avec des partenaires italiens spécialistes du contrôle moteur (chez l’humain) et des synergies musculaires (VA et MG).
En France
Station de Primatologie du CNRS (UAR 846, Rousset-sur-Arc)
Parc zoologique et botanique de Mulhouse
Jardin zoologique de la citadelle de Besançon
Vallée des Singes, Romagne
––––––––––––––––––––––––––-
En République Démocratique du Congo
Territoire de Bolobo (Embirima), collaboration V. Narat et ONG Mbou-Mon-Tour
